“背景模糊(散景)與傳感器尺寸有何關係?”
簡短答案:傳感器越大,混淆圈越大,這是計算傳感器的重要考慮因素景深(DOF),從而導致較大的光圈(較大的開口)具有足夠淺的DOF,從而使背景中的點光源(小光)模糊;
幾乎沒有什麼區別,我將在後面詳細介紹,並進行適當的調整以保持相似的構圖。
散景是一種模糊現象,也可能在前景中出現,並且不必局限於遠處的燈泡,儘管有些限制將該術語的使用僅限於那些條件。通過查看背景中的光點並查看它們是否看起來像圓光滑的圓盤,可以更輕鬆地判斷散景的質量,背景不是散景發生的唯一位置。
散景一詞來自日語單詞boke(暈け或),意思是“模糊”或“霧霾”,或boke-aji(boケ味),即“模糊質量”。 [注意:它與微小的燈光或背景與前景無關,這是景深之外的模糊質量。相反,焦點是景深內的[strong]清晰度,尤其是在焦點處。]
現在您不高興那是短版。
使用尼康D700上的尼康200.0 mm f / 2.0拍攝的圖像,可以說是用於攝影的散景效果更好的鏡頭之一。圖片來源: Dustin Diaz。

許可:歸因-非商業性-NoDerivs 2.0通用(CC BY-NC-ND 2.0)
找到便宜的鏡頭很容易,並且很多像這些鏡頭一樣:Hexanon AR 135 / 3.2,Pentacon 135 / 2.8,Rokko 135 / 2.8,Trioplan 100 / 2.8,Vivitar 135 / 2.8,事實是,與質量相反,任何一種產生的散景都是(禮貌地)是 creative ,如果使用大型傳感器,則需要與修剪一起使用的適配器。小型傳感器和廉價鏡頭可以為某些(許多?)產生令人愉悅的效果。
所謂的完美散景的標誌是,點源將產生圓盤,而圓盤上沒有任何環或像差。在邊緣逐漸衰減。圓盤應該在球面鏡的邊緣處是圓形的。

儘管變形鏡會產生典型的橢圓形散景。
在深入解釋之前,我們先定義一些事情。
-
背景:圖像主題後面的區域。
-
前景:圖像主題前面的區域。
-
模糊:導致視力不全,使模糊不清或模糊不清。銳化的反義詞。
-
散景:當景深超出範圍時,圖像的對焦區域模糊的質量
-
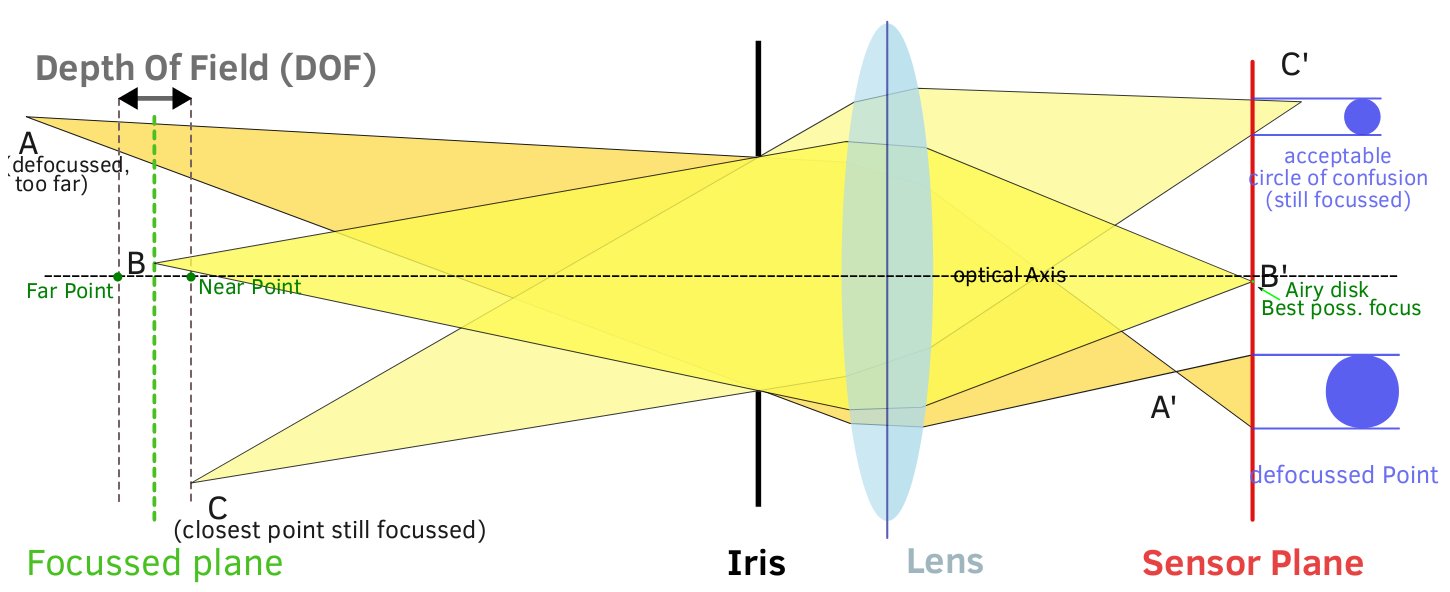
混亂的圓:在理想的射線光學中,假定光線會聚到完美聚焦的點,具有圓形光圈的鏡頭散焦模糊點的形狀是一束硬邊的光。由於衍射和像差( Stokseth 1969,paywall; Merklinger 1992,可訪問),更普通的模糊點具有柔和的邊緣,並且由於光圈形狀而可能是非圓形的。
認識到實際的鏡頭即使在最佳條件下也無法完美地聚焦所有光線,因此術語“最小混亂度”通常用於鏡頭可能產生的最小模糊點(Ray 2002,89),例如選擇最佳鏡頭。焦點位置,可以很好地折衷由於球面或其他像差而導致的不同鏡頭區域的有效焦距之間的折衷。
“混淆圓”一詞更普遍地用於鏡頭將物點成像到的焦點。它涉及1.視敏度,2.觀看條件和3.從原始圖像到最終圖像的放大。在攝影中,混淆圓(CoC)用於數學確定景深,即圖像可接受的清晰部分。
-
景深:場景中最近的和最遠的對象之間的距離,這些距離在圖像中看起來可以清晰地顯示出來。儘管鏡頭一次只能精確地聚焦一個距離,但是在聚焦距離的每一側,清晰度都會逐漸降低,因此在自由度範圍內,在正常觀察條件下不會感覺到不清晰。
-
傳感器尺寸:
-
照相:在攝影中,傳感器的尺寸是根據膠片的寬度或感光區域的有效面積來測量的數字傳感器。 35毫米這個名稱源自 135膠片的總寬度,該膠片是穿孔的暗盒膠片,是全幅數碼單反相機發明之前格式的主要介質。術語135格式仍在使用。在數碼攝影中,這種格式已被稱為全畫幅。攝影35毫米膠片的可用區域的實際大小是24w×36h毫米,而35毫米是指尺寸24毫米加上鍊輪孔(用於推進膠片)。
-
視頻:傳感器尺寸以英寸表示,因為在數字圖像傳感器普及時,它們被用來代替視頻攝像機鏡筒。普通的1“圓形視頻攝像管具有一個矩形的感光區域,對角線約為16 mm,因此,對角線大小為16 mm的數字傳感器相當於1”的視頻管。 1英寸數字傳感器的名稱應更準確地理解為“一英寸視頻攝像管等效物”傳感器。當前數字圖像傳感器的尺寸描述符是視頻攝像機管的等效尺寸,而不是傳感器的實際尺寸。 1“傳感器的對角線尺寸為16毫米。
-
對象:您要捕獲圖像的對象,不一定是要捕獲的所有對象出現在框架中,當然不是照片轟炸機,並且通常不會出現在極端的前景色和背景中。因此,使用散景或景深來散焦不是主體的對象。
-
調製傳遞函數(MTF)或空間頻率響應(SFR):成像系統相對於輸入空間頻率的相對幅度響應。 ISO 12233:2017規定了測量電子靜態照相機的分辨率和SFR的方法。每毫米線對(lp / mm)是膠片最常見的空間頻率單位,但是周期/像素(C / P)和線寬/圖片高度(LW / PH)對於數字傳感器來說更方便。
現在我們已經有了定義...
來自維基百科:
CoC(毫米)=可視距離(厘米)/ 25厘米所需的最終圖像分辨率(lp / mm)觀看距離/放大/ 25
例如,當預期觀看距離為50 cm且預期放大率為8時,對於25厘米觀看距離,支持等於5 lp / mm的最終圖像分辨率:
CoC = 50/5/8/25 = 0.05毫米
由於在拍攝照片時通常不知道最終圖像的尺寸,因此通常採用標準尺寸,例如25厘米寬,以及0.2毫米的常規最終圖像CoC,即圖像寬度的1/1250。通常也使用關於對角線度量的約定。如果在放大到最終圖像尺寸之前裁剪了原始圖像,或者更改了尺寸和觀看假設,則需要調整使用這些約定計算的DoF。
使用“蔡司公式”,有時將混亂圈計算為d / 1730,其中d是原始圖像(相機格式)的對角線度量。對於35毫米全畫幅格式(24毫米×36毫米,對角線為43毫米),結果為0.025毫米。更為廣泛使用的CoC是d / 1500,對於全幀35 mm格式為0.029 mm,這對應於在30 cm對角線的打印分辨率為每毫米5行。對於全畫幅35毫米格式,0.030毫米和0.033毫米的值也很常見。出於實際目的,d / 1730(最終圖像的CoC為0.2 mm)和d / 1500給出了非常相似的結果。
還使用了將CoC與鏡頭焦距相關的標準。 Kodak(1972),5)建議使用2分鐘的弧度(正常視力的Snellen標準為30個週期/度)進行關鍵觀察,得出CoC≈f / 1720,其中f是鏡頭焦距。對於全畫幅35 mm格式的50 mm鏡頭,CoC≈0.0291 mm。該標準顯然假定最終圖像將以“透視正確”的距離觀看(即,視角將與原始圖像的視角相同):
觀看距離=焦距鏡頭×放大
但是,很少在“正確”距離觀看圖像;觀看者通常不知道攝影鏡頭的焦距,“正確”的距離可能太短或太長。因此,通常將基於鏡頭焦距的標準讓給與相機格式相關的標準(例如d / 1500)。
此COC值表示最大模糊點直徑,該值在圖像平面,看起來很清晰。直徑小於此COC值的點將顯示為光點,因此會聚焦在圖像中。直徑較大的斑點對觀察者而言將變得模糊。
自由度不對稱。這意味著可接受焦點的區域在焦平面之前和之後沒有相同的線性距離。這是因為來自較近物體的光會聚在像平面後方的距離比來自較遠物體的光在像面之前會聚的距離大。
在相對較近的距離處,DOF幾乎是對稱的,大約一半的聚焦區域位於聚焦平面之前,而另一半則位於聚焦平面之後。焦平面離像平面的距離越遠,對稱偏移越大,有利於焦平面以外的區域。最終,鏡頭聚焦在無限遠點,自由度達到最大不對稱性,大部分聚焦區域超出了聚焦平面到無限遠的範圍。該距離稱為“ 超焦距”,將我們引向下一節。
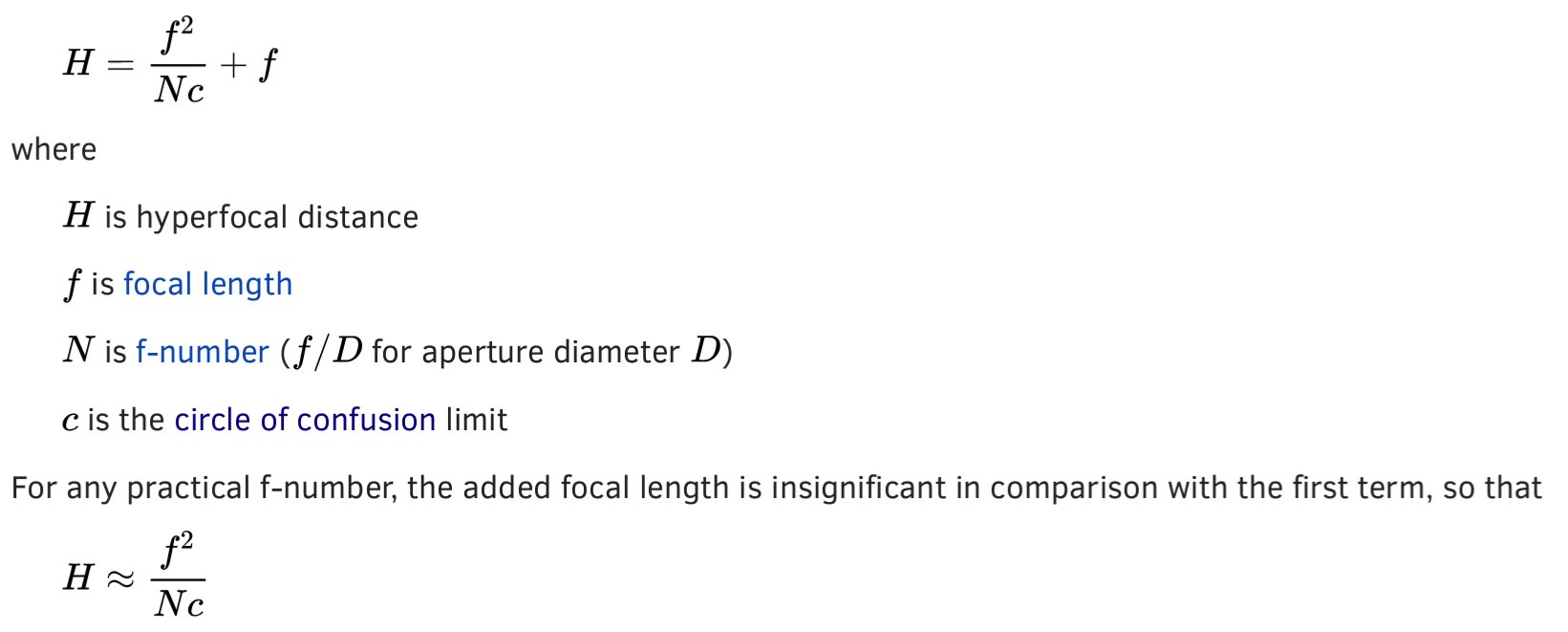
超焦距是指將鏡頭聚焦在無窮遠處時物體的距離。從該距離的一半到無窮遠將對特定鏡頭聚焦。替代地,超焦距可以指的是在給定光圈下透鏡可以聚焦的最接近距離,而距離(無限遠)處的物體將保持清晰。
超焦距是可變的,並且是光圈,焦距和上述COC的函數。鏡頭光圈越小,超焦距就越接近鏡頭。超焦距用於計算DOF。
摘自Wikipedia :
有四個因素決定了自由度:
- 混亂的圈子(COC)
- 鏡頭光圈
- 鏡頭焦距
- 焦距(鏡頭與被攝物體之間的距離)
ol> DOF =遠點–近點
DOF只是告訴攝影師在對焦距離之前和之後的距離是多少,模糊會導致模糊發生。它沒有指定這些區域的模糊程度或“質量”。鏡頭的設計,光圈的設計和背景定義了模糊的特徵-強度,紋理和質量。
鏡頭的焦距越短,鏡頭的焦距就越長自由度。
鏡頭的焦距越長,景深越短。
如果這些公式中的任何位置都沒有顯示傳感器大小,它將如何改變景深?
有幾種偷偷摸摸的格式大小潛入DOF數學中的方法:
放大係數焦距主體到相機/焦距
因為裁剪因子和所產生的焦距以及傳感器光收集能力所必需的光圈,會對您的計算產生最大的影響。
將產生更高分辨率的傳感器和質量更好的鏡頭散景更好,但即使是手機大小的傳感器和鏡頭也可以產生合理的散景。
在APS-C和全畫幅相機上以相同的被攝物到相機距離使用相同的焦距鏡頭會產生兩個不同的圖像取景,並導致景深和深度的變化。
在APS-C和全畫幅相機之間切換時,根據裁剪因子切換鏡頭或更改主體到相機,以在相似的景深中保持相同的取景結果。移動您的位置以保持相同的構架會稍微有利於全幀傳感器(以獲得更大的景深),只有在更換鏡頭以匹配裁切因子並保持構架時,較大的傳感器才能獲得較窄的景深(而不是很多)。
光圈的優勢使全畫幅傳感器成為相機和鏡頭以及功能(FPS既不是其中之一,也不是尺寸和重量)方面更好,更昂貴的選擇。
使用中型傳感器而不是小型傳感器將進一步有利於較大的傳感器,但散景可能不是證明價格相差20倍以上的最佳用例。
每點光的像素數量更多,無疑會產生更平滑的散景,但使用小型傳感器攝像頭時,散景會更接近。如果您是從照片或視頻中賺錢的,則可以使用更昂貴的設備收取更多的按比例收取的費用, ,否則,花一些功夫或使用其他成本更低的鏡頭,可以節省大量資金,而無需購買更大格式的系統。
維基百科部分:前景和背景模糊。
查看本文“ 分期前景”。 “由RJ關於前景模糊的內核,其中包括許多具有背景和前景模糊的照片。
B&H的文章分為3部分,內容涉及景深:景深,第一部分:基礎知識,第二部分:數學和第三部分:神話。
最重要的是,“散景”不僅是“背景模糊”,還包括景深之外的所有模糊;即使在前景中。遠處的小燈更容易判斷散景質量。

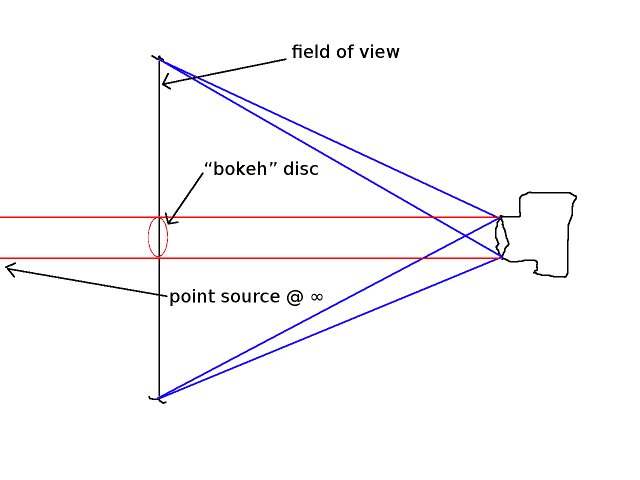 考慮一下,您獲得的圖像只是焦平面中圖像的縮小版本。紅色光束是從點光源入射並通過入射光瞳的光束。我標記為“散景盤”的東西是光束與聚焦平面相交的地方。如果光源足夠遠,它的直徑與入射光瞳的直徑完全相同,並且它是散景光盤的物方對應物。實際的散景光盤位於圖像空間中,並且是此處繪製的光盤的圖像。
考慮一下,您獲得的圖像只是焦平面中圖像的縮小版本。紅色光束是從點光源入射並通過入射光瞳的光束。我標記為“散景盤”的東西是光束與聚焦平面相交的地方。如果光源足夠遠,它的直徑與入射光瞳的直徑完全相同,並且它是散景光盤的物方對應物。實際的散景光盤位於圖像空間中,並且是此處繪製的光盤的圖像。